






 PLUG & PLAY
PLUG & PLAY
Log data out-the-box. Standalone. Link your CAN bus to your server in <2 mins

 COMPACT
COMPACT
Only 8 x 5 x 2 CM. 100G. Aluminium enclosure.6 LEDs. Configurable 5V power out (CH2)

 GNSS + 3D IMU
GNSS + 3D IMU
Built-in GNSS/IMU. 3X accuracy via sensor fusion. Position, speed, acceleration & more

Pro specs CAN logger
- at half the cost
The CANedge2 combines innovative design, cutting-edge components - and incredibly low costs:
- 2 x CAN (incl. CAN FD) + 2 x LIN channels
- Extractable 8-32 GB industrial SD card (= months of data)
- Popular binary MDF4 log file format
- Advanced message filtering & transmit functionality
- Route data from CAN1/2, LIN1/2 and GPS/IMU onto CAN1/2
- Start/stop logging triggers based on CAN ID & databytes
- Silent mode, bit rate auto-detection, cyclic logging
- Data compression & encryption (e.g. for GDPR, CCPA)
- Support for CAN/LIN error frame logging
- Fast boot time. Safely disconnect during use (power safe)
- Add CANmod to e.g. log 5 x CAN or temperature/analog data









Reinventing telematics
Today, fleet telematics is vital across vehicles and machines.
However, end users face challenges: Expensive subscriptions. No data ownership. Security concerns. Vendor lock-in.
The CANedge2 provides a modern alternative:
- Upload data to your own local/dedicated/cloud server
- Simply add WiFi access point & server details to the config
- Log data to the SD and auto-upload when connected to WiFi
- Configure file split size/period to control upload frequency
- 100% secure: HTTPS, credential encryption and more
- Manage via over-the-air updates (firmware & configuration)
- Zero fees. Zero lock-in. Interoperable. Open source tools
- Or, use web server interface to pull data without a server
GPS & 3D IMU - enrich your data
The CANedge2 comes with cutting-edge GNSS/IMU functionality - perfect for use cases like vehicle telematics.
- Add 40+ GNSS/IMU signals to your 2 x CAN/LIN data
- Full GNSS support (GPS, Galileo, BeiDou, GLONASS)
- Built-in gyroscope (roll, pitch, yaw) and accelerometer (X, Y, Z)
- High precision via sensor fusion - even in GNSS hostile areas
- Signals encoded as 'internal' CAN frames (separate channel)
- Configurable message inclusion/frequency (up to 5 Hz)
- DBC file included for easy decoding to human-readable form
- Optionally sync the CANedge RTC via precise GNSS time
- Flexible deployment via external GNSS antenna
Position + sensor fusion
Add time-synced GPS positioning to your CAN/LIN data - with sensor fusion (UDR) for 3x higher accuracy.

Speed
Speed data is useful in e.g. fleet telematics to identify speeding, idle time, asset utilization rates and more.

Altitude
Altitude is key in e.g. analysis of fuel/battery consumption - or e.g. in aerospace applications like drones, planes etc.

Attitude
The GNSS/IMU enables attitude data, giving a 3D view of the asset orientation at any time [automotives].

Trip distance
Trip odometer data enables easy tracking of the trip distance travelled by the asset (since last module power cycle).

Angular rates
3D IMU angular rates can be used in e.g. the analysis of driving and vehicle dynamics (tire/suspension, drifting, ...).

Acceleration rates
3D IMU acceleration rates can be used in e.g. analysis of driving quality and predictive maintenance.

Geofences
Configurable circular geofences are useful for e.g. theft prevention, safety, automation and more

Timestamp
The high precision epoch timestamp is useful e.g. in syncing the CANedge real-time clock.

Open source software/API
- naturally
The CANedge2 uses open formats (MDF4 data, JSON config, S3 server) - and all software/APIs are 100% free and open source.
The software toolbox includes:
- Editors: Easily modify your device config (online/offline)
- CANcloud: Manage connected CANedge2 devices & data
- S3 drive: Mount your S3 server as a 'local drive'
- Converters: Convert data to Vector ASC, PEAK TRC, CSV, ...
- asammdf GUI: DBC decode, plot and export your data
- Python API: Automate your data processing & integrations
- Dashboards: Visualize data in custom browser dashboards
Check out our tech specs, use cases or FAQ - or buy now!
Do you have any questions?
Contact us



| GENERAL | |
|---|---|
| Functionality | Standalone CAN bus data logger with SD card, 2xCAN/LIN channels, WiFi and GNSS/IMU |
| Firmware | Supports free firmware updates for adding features |
| Configuration | Configuration files based on the popular open source JSON schema concept |
| Software | Free open source editor tool for easy device configuration (offline/online version available) |
| Free open source CANcloud telematics platform for managing devices & data via your browser | |
| Multiple tools for mounting your S3 server as a local drive for easy access | |
| Free open source asammdf software & API for editing, DBC converting & plotting MF4 data | |
| Free open source MF4 converters - drag & drop log files to convert into e.g. CSV, ASC, TRC | |
| Free open source Python API - e.g. for automated data processing, reporting or integrations | |
| Free open source telematics dashboards for visualizing your DBC decoded data in your browser | |
| Safety | CE-RED, FCC, IC, RoHS, ECE R10 (automotive EMC), WPC ETA (India), RCM (Australia), ICASA (South Africa) |
| For Korea/Japan, a certified 'PB' variant with internal WiFi antenna is available (KC, GITEKI) | |
| Warranty | 1-year warranty |
| Support | Free, fast & high quality support |
| Origin | Denmark |
| CAN BUS | |
| Channels | 2 x CAN FD channels (Controller Area Network) |
| Standard | ISO 11898: Compliant with CAN (up to 1 Mbit/s) and ISO & Bosch CAN FD (up to 5 Mbit/s payload rate) |
| Protocols | Log raw data from CAN based protocols (J1939/FMS, CANopen, NMEA 2000, OBD2, CAN FD, UDS, ...) |
| Identifiers | Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID) |
| Bit-Rate Auto-Detect | Bit rate can be auto-detected or set manually |
| Retransmission | Configurable retransmission of frames that have lost arbitration or been disturbed by errors |
| Transceiver Protection | ±16 kV HBM ESD, ±15 kV IEC ESD, ±70 V bus fault, short circuit |
| Common mode input voltage: ±30 V | |
| TXD dominant timeout (prevents network blocking in the event of a failure) | |
| LIN BUS | |
| Channels | 2 x LIN channels |
| Publisher/Subscriber | Each LIN channel can be configured as a LIN subscriber/publisher with support for LIN data transmission |
| Custom length | Support for custom frame lengths |
| Standard | Compliant with LIN 2.X up to 20 Kbit/s (support for Classic & Enhanced checksum format) |
| Transceiver Protection | ±8 kV HBM ESD, ±1.5 kV CDM, ±58 V bus fault |
| TXD dominant timeout (prevents network blocking in the event of a failure) | |
| DATA LOGGING | |
| SD Card | 8 GB extractable Class 10 industrial micro SD (SDHC) included (optional 32GB) - read at 80 MB/s
i
The device uses a class 10 industrial micro SD card with strong specs:
|
| Parallel CAN/LIN | Record data from up to 2 x CAN channels + 2 x LIN channels, simultaneously |
| Real-Time Clock | Yes - CAN frames are date & timestamped with 50 microsecond resolution (battery backup) |
| The RTC can be configured to match local time zones (default: UTC) | |
| The RTC can be auto-synced via WiFi or a CAN message (e.g. from the internal GNSS timestamp) | |
| Log File Format | Log data in industry standard binary MF4 (easily convert to e.g. CSV, ASC, pandas, MATLAB, ...) |
| Data Compression | Configurable embedded log file compression (~50-80% size reduction) |
| Silent Mode | Configurable silent mode: Restricted (acknowledge only) or monitoring (zero transmission) |
| Filters | 128/64 regular/extended ID filters per channel (range, mask, acceptance, rejection) |
| Prescaling | Prescale CAN frames to record e.g. by time (per X ms) or by data (e.g. if byte X or Y changes) |
| Transmit | Transmit lists of CAN frames per channel (single-shot/periodic) - e.g. for OBD2/UDS/XCP/J1939 requests |
| Gateway Routing | Data from CAN1/2, LIN1/2 and CAN9 (GPS/IMU) can be routed onto CAN1/2 (with optional ID re-mapping) |
| CAN Error Frames | Support for logging CAN error frames (bit-stuffing, form, CRC, bit, acknowledgement) |
| LIN Error Frames | Support for logging LIN error frames (checksum, receive, synchronization, transmission) |
| Remote Frames (RTR) | Support for logging/transmission of remote CAN frames (RTR) |
| Cyclic Logging | Optional cyclic logging mode (oldest log file is deleted when SD card is full) |
| Advanced Triggers | Control signal lets you start/stop logging based on custom CAN IDs & data thresholds |
| CAN Heartbeat | Optionally transmit heartbeat CAN frame with device status, storage used & RTC time |
| File Split | Configurable log file split size (by size: 1-512 MB and/or by time period: 0-86400s) |
| Power Safe | 100% power safe data logging - no file corruption when disconnected |
| Unique Device ID | Each device has a globally unique ID ensuring unique log file naming |
| Data Encryption | Log files can be encrypted at rest on the SD card for security/GDPR/CCPA (incl. integrity check) |
| WIFI | |
| Transfer Modes | Station mode: Connects to a WiFi access point to transfer data |
| Protocol | HTTP/HTTPS: Stable and secure transfers - ideal for big data telematics |
| Access Points | Add 1-4 WiFi access points. Prioritized order. Condition on signal strength |
| Over-The-Air (OTA) | Configuration & firmware over-the-air (COTA/FOTA). Configurable sync rate. Optionally disable |
| WiFi Heartbeat | If enabled, the CANedge2 periodically "checks-in" to your server by uploading a small device status file |
| Data Upload State | Optionally disable/enable upload of log files (e.g. via over-the-air configuration) |
| Range | Strong range via external WiFi antenna |
| LAN Standard | IEEE 802.11 b / g / n |
| Frequency | 2.412-2.472 GHz (power output of 18.5dBm, 802.11b 11Mbps) |
| Antenna | External (SMA, <2 dBi gain). Can be extended or replaced by e.g. a WiFi rooftop antenna |
| S3 Server Interface | Upload data to your own cloud server (e.g. Amazon, Google, Azure) or self-hosted server (e.g. MinIO) |
| Web Server Interface | Pull data from SD via WiFi (through browser web page or REST API) - no server required |
| WIFI SECURITY | |
| HTTPS | Data & over-the-air updates can be sent via HTTPS (TLS 1.2) for secure transfer to server |
| WPA/WPA2 | Supports WPA/WPA2 |
| Credential Encryption | WiFi access point & S3 server credentials can be encrypted in the config on the device SD card |
| Signed Firmware | Firmware updates are digitally signed to verify that they are from a trusted source |
| User Policies | Fully customize access rights across CANedge devices and end users through S3 policies |
| GNSS & 3D IMU | |
| Module | Professional-grade u-blox NEO-M9V sensor module (92-channel) with built-in gyroscope and accelerometer |
| GNSS | Supports combinations of GPS (USA), Galileo (Europe), BeiDou (China), GLONASS (Russia) |
| Sensor Fusion (UDR) | Enhanced position precision via sensor fusion (UDR) of GNSS and 3D IMU [automotives only] |
| Up to 3x better accuracy vs. GNSS-only receivers | |
| Extended and improved GNSS fix in GNSS hostile areas (e.g. urban environments, tunnels, ...) | |
| Accuracy | Position: 2.0 m CEP (Circular Error Probable) |
| Heading: 0.3 deg | Pitch: 0.4 deg | Roll: 0.6 deg (68% at 30 m/s) | |
| Velocity: 0.08 m/s | |
| Sensitivity | Tracking/Navigation: 160 dBm | Cold starts: 148 dBm |
| Acquisition | Cold starts: 25 s |
| GNSS Antenna | Required for GNSS-based data (not for IMU) |
| DATA PARAMETERS | |
| CAN encoding | The GNSS/IMU data is encoded as 'CAN messages' within the CANedge log files (on a separate channel) |
| Configuration | GNSS/IMU messages can be filtered/prescaled to enable custom message inclusion and frequency |
| Optionally record GNSS/IMU messages only if valid | |
| Signals | The module adds several GNSS/IMU signals (for a full list, see the Docs or DBC file) |
| GNSS position: Longitude and latitude information [5 Hz] | |
| GNSS time: Precise GNSS based epoch timestamp [5 Hz] | |
| GNSS status: Fix type (NO/UDR/2D/3D/GNSS+UDR) and satellite count [5 Hz] | |
| GNSS speed: Travel speed in m/s and km/h [5 Hz] | |
| GNSS altitude: Altitude in meters [5 Hz] | |
| Attitude/orientation: Roll, pitch, heading [automotives only] [5 Hz] | |
| GNSS odometer: Distance traveled (since power on) [5 Hz] | |
| 3D IMU: Accelerometer-based acceleration (X, Y, Z) [5 Hz] | |
| Geofences: Status of the configured geofences [5 Hz] | |
| ELECTRICAL | |
| Input Supply | +7V to +32V DC via the Channel 1 DB9 (e.g. from the vehicle/machine power supply) |
| Power Consumption | Extremely low (~1 W) - no risk of battery drainage |
| Protection | Reverse voltage protection on CAN-bus supply |
| Transient voltage event protection on supply lines | |
| MECHANICAL | |
| Enclosure & Weight | Compact aluminium enclosure: 75 x 47 x 20 mm (W x L x H excl. flanges & antenna connector). 100 grams |
| Antennas | WiFi antenna and GPS antenna included |
| Flanges | Flanges with 4 x M3 screw holes (head diameter < 6 mm) - see also the CANedge 'mounting kit' |
| Connector | 2 x Standard D-sub 9 (DB9) connectors (optional OBD2/J1939/... adapters) |
| Pin-Out | See the product manual for the DB9 connector pin-outs |
| Configurable Power Out | Channel 2 can be configured to supply 5V to external modules (e.g. the CANmod sensor-to-CAN modules) |
| LEDs | Logger status via 6 external LEDs: Power, CH1, CH2, Memory, WiFi, GNSS |
| Temperature | Operating temperature (parts): -25degC to +70degC |
| IP Rating | IP40 (optional IP67 enclosure kit available) |
The CANedge2 is a powerful, standalone CAN logger for ad hoc analysis, diagnostics and development.
However, the device truly shines in e.g. fleet telematics and IoT machinery setups:

Underground mining & construction
Want to implement vehicle telematics - but your vehicles are underground?
Mining fleets often require automated monitoring, performance monitoring and diagnostics. However, vehicles often only re-surface briefly from mines - making it vital to have an offline 'buffer' if no underground WiFi network is available. Here, the CANedge2 logs data to the SD card and auto-uploads it when the vehicles re-surface and come within range of the WiFi. Further, the GNSS/IMU functionality enables easy tracking of assets - and provides vital signals like position, trip distance, speed and accelerations. Learn more in our mining telematics intro.
Warehouse fleet management
Need to monitor a fleet of AGVs/forklifts in a warehouse?
For site managers/OEMs, the device can collect data from AGV/forklift fleets - e.g. for optimizing battery management. By connecting to the warheouse WiFi, the devices can continuously upload data to your own local/cloud server. This also enables practical predictive maintenace as showcased in this case study of 250+ AGVs.


Vehicle telematics
Need to monitor & optimize a vehicle fleet in near real-time?
For wireless 'on-road' upload of data, the device can connect via a 3G/4G hotspot - or you can use a CANedge3 with internal SIM card for 3G/4G transfer. Alternatively, the CANedge2 can upload data when the vehicle periodically returns to e.g. a terminal WiFi. Ideal for e.g. OBD2 logging, truck fleet management, predictive maintenance and more.
Tip: For 3G/4G use cases, we strongly recommend using the CANedge3.
Remote machine monitoring
Need to remotely monitor & troubleshoot industrial machinery?
Production machinery OEMs often need to deal with diagnostics, maintenance and field breakdowns. Local troubleshooting can be costly and slow. Here, the CANedge2 can be installed to diagnose issues remotely - and/or set up wireless predictive maintenance. Further, with configuration over-the-air, you can e.g. reset the machine via remote controlled transmit messages. Learn more in our CANopen data logger intro.


White label partnerships (OEMs/integrators)
Need a data logger in your product - or as a telematics platform?
The CANedge2 CAN bus logger is easy to integrate in existing systems, making it ideal as a hardware platform for CAN bus telematics solutions. Configuration files, server interfaces, log files etc. all utilize open file formats, with open source API tools available. Further, all software is 100% open source and customizable - for example the CANcloud telematics platform, or the customizable Grafana dashboards.
Collect data ad hoc without ejecting SD
Need to easily extract selective data on an ad hoc basis?
If you use the CANedge2 in e.g. a test bench or lab setup, you may want to access data 'ad hoc' - while ideally leaving the device continuously installed (and logging data to the SD card). With the web server interface, you can configure the device to connect to your office WiFi network and thus enable access to the SD via standard web browsers from any PC on the network. The access can be restricted via use of an encrypted password. With this, your team can easily fetch the data they need, when they need it.

Yes, this version of the CANedge includes a GNSS/IMU module. If you install the device with an external GNSS antenna, this lets you optionally record GNSS/IMU data in time sync with your 2 x CAN/LIN data.
The GNSS/IMU information is recorded as if the data was being broadcast on a CAN bus network recorded by the CANedge. To separate it from the CAN/LIN channels, the data is stored in the log files under a separate 'internal' pseudo channel.
Previously, adding GNSS/IMU to the CANedge required connecting a GPS-to-CAN module (like the CANmod.gps) to the CANedge (e.g. on the 2nd port).
The new internal GNSS/IMU achieves a number of advantages:
- It is far more compact - and easier to install
- Total cost is drastically reduced
- The 2nd CAN channel of the CANedge is 'freed up' for logging CAN data
- The internal GNSS messages are available at up to 5 Hz vs. 1 Hz
- The GNSS/IMU is now configured via the CANedge Configuration File
- The GNSS timestamp can be used to sync the CANedge RTC (eliminating drifting)
The CANmod.gps is, however, relevant if you need to add GNSS/IMU data to another CAN bus system. Further, the CANmod.gps supports a 100 Hz output rate for the IMU based messages (angular and acceleration rates) vs. 5 Hz for the internal GNSS/IMU.
If you need to upload data via 3G/4G LTE (instead of WiFi), we recommend the CANedge3.
The CANedge3 is identical to the CANedge2 with GNSS/IMU, but instead of WiFi it has built-in 3G/4G LTE functionality and a SIM card slot. This makes it superior for cellular data transfer use cases.
In contrast, the CANedge2 is ideal for use cases where a WiFi network is available. For example, mining or warehouse telematics often enable continuous WiFi access, letting you offload data without cellular transfer costs. Similarly, the CANedge2 is ideal if your vehicle/asset periodically comes within range of a stationary WiFi network. In this case, log files accumulated on the SD card can be automatically offloaded without incurring cellular transfer costs.
You can also deploy the CANedge2 together with a 4G LTE WiFi router. This lets the CANedge2 connect to the router via WiFi - and thus gain access to the internet for LTE transfer. This can be optimal if multiple CANedge2 devices can share a single 4G WiFi router as in e.g. our VIVES case study. However, since such cases are more rare, the CANedge3 is generally recommended when the aim is to upload data via 4G LTE.
The CANedge is the 2nd generation of the CLX000. We recommend the CANedge for any logging-focused use case, while the CANsub is our recommendation for any real-time CAN streaming use case (the CLX000 is now considered legacy).
Key improvements in the CANedge vs. CLX000 include:
Mechanical
- Extractable SD: The SD can be extracted to transfer data at 80 MB/s (vs 0.5 MB/s for the CLX000 via USB)
- Industrial SD: The CANedge uses an industrial SD card, improving performance, life time, temperature range & more
- Channels: 2 x CAN/LIN channels, enabling logging of 2 x CAN + 2 x LIN in parallel
- Aluminum enclosure: New enclosure is as compact as the CLX000, but far more robust and offers flanges for mounting
- Power out: Power external modules via the 2nd port, e.g. a GPS-to-CAN or Temperature-to-CAN module
- Rugged protection: The CANedge comes with a stronger protection spec against e.g. voltage spikes
Log files & software/API
- MDF4 log files: Popular binary MDF4 format - more compact than CSV, faster to process, supported by many CAN tools
- Configuration: Open source configuration editor can be used either online/offline via your browser
- JSON Schema: Config files are based on the standardized JSON Schema concept, supported by many open source tools
- Converters: Open source light-weight converters enable drag & drop/CLI conversion of MDF4 into e.g. *.csv and *.asc
- asammdf GUI: Enables user-friendly MDF4 log file editing, DBC-conversion (incl. OBD2/J1939), graphical plots & more
- Python API: Easily process your data at scale and automate the creation of e.g. reports/databases/dashboards
- MATLAB: Log files integrate natively with MATLAB's Vehicle Network Toolbox
- Dashboards: Easily visualize your data in free customizable Grafana dashboards
Data logging
- Lossless: The CANedge can log full bus loads with zero message loss (the CLX000 is limited to ~800-1000 frames/sec )
- Compression: Optional compression lets you reduce file size by up to 80% vs. the CLX000
- Encryption: Optional encryption lets you encrypt log files on the SD card for added security
- Advanced configuration: More advanced filters & transmit lists (e.g. up to 128 filters vs. 8 on CLX000)
- Precision: 20x higher RTC resolution (50 micro seconds) - with advanced RTC sync options
- Boot time: Much faster boot time vs the CLX000 (~1 sec vs. ~10 sec)
- CAN FD: The CANedge supports CAN FD (Flexible Data-Rate), making it future proof
- Triggers: Control when to start/stop logging/transmission based on custom CAN signal thresholds
- Error frames: The CANedge supports CAN/LIN error frame logging
- LIN slave/master: The CANedge can both serve as a LIN slave or LIN master (publisher)
GNSS/IMU + connectivity
- GNSS/IMU: The CANedge supports optional built-in GNSS/IMU functionality
- WiFi: The CANedge2 supports WiFi data transfer to your own cloud/self-hosted server (incl. OTA updates)
- 3G/4G: The CANedge3 supports 3G/4G LTE data transfer to your own cloud/self-hosted server (incl. OTA updates)
The CANedge1 and CANedge2 are 100% identical, except for the WiFi functionality in the CANedge2.
If you only need to collect your CAN data rarely and the device is physically accessible with ease, then the CANedge1 is typically enough. However, if you need to collect your data frequently and ideally remotely, the CANedge2 will quickly be worthwhile. In particular, if you need to collect data across a fleet of vehicles or machines, the CANedge2 is far more practical and cost effective.
The CANedge2 also has the added advantage that you can fully automate your data collection, as well as your data processing workflow. For example, you can set up automated Python API scripts to modify your data, DBC decode it - and e.g. setup telematics dashboards. The CANedge2 is also easier to manage in the field as you can monitor the status via the CANcloud telematics platform and e.g. perform over-the-air configuration and firmware updates.
For use cases where a WiFi network is available, we recommend the CANedge2. If you need to upload data via 4G LTE (cellular), we recommend the CANedge3.
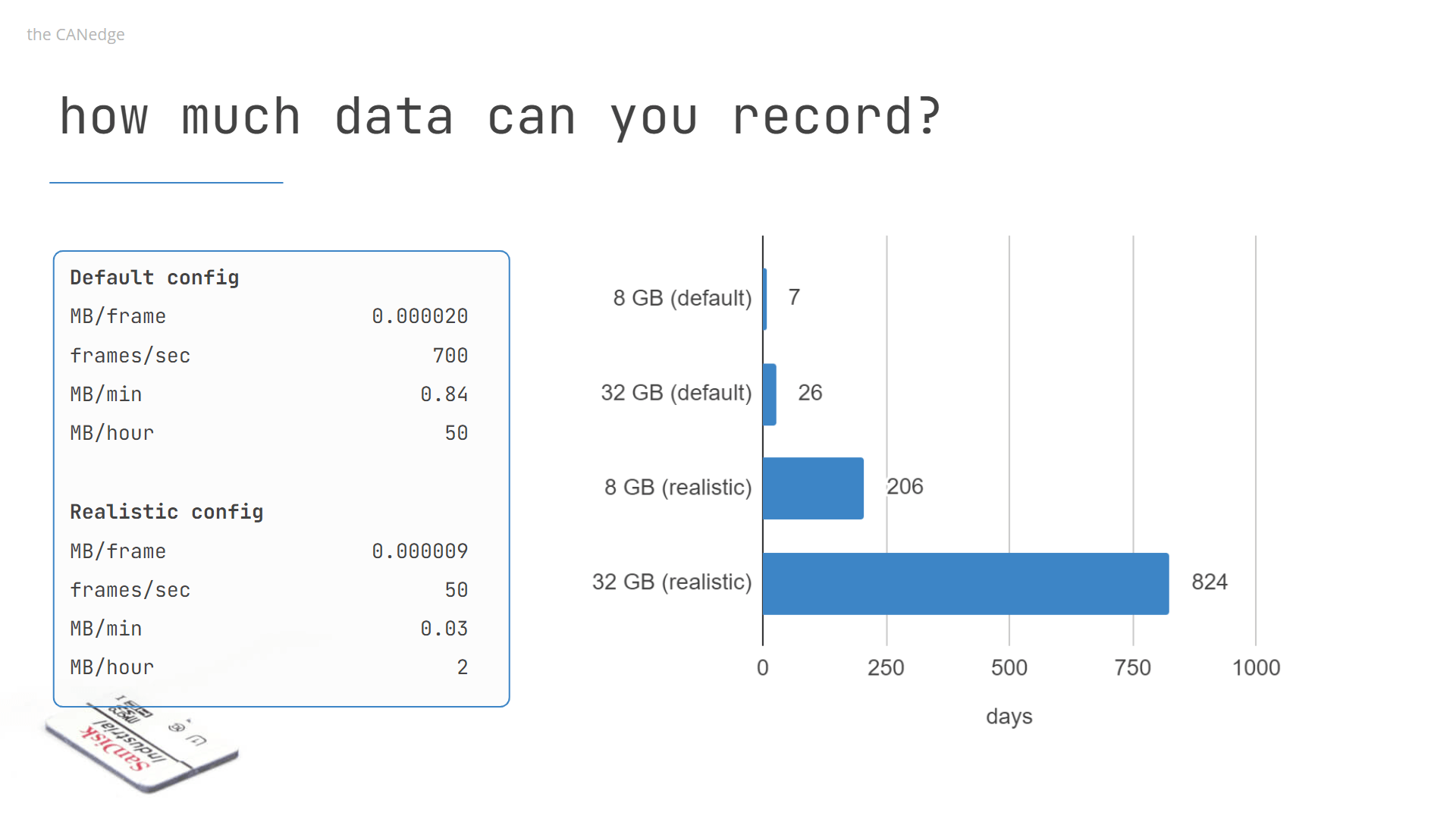
The size of a raw MF4 log files depends on the application - and how much data you wish to record.
The below overview shows a typical example for a heavy duty truck (J1939 data), exhibiting 700 frames/second. As evident, if you record everything, an 8 GB SD card will let you record data 24/7 for ~7 days - while the 32 GB would enable ~26 days.
However, the CANedge supports powerful options for optimizing the log file size. As a result, a more realistic scenario is shown below in which e.g. a 32 GB SD lets you record 800+ days.
Below we list some of the key features that let you optimize your logging:
- Compression: Enable compression to reduce the data size by 50-80%
- Filters: Specify which CAN IDs to record/ignore (via ranges and masks)
- Prescalers: Instead of recording frames at their 'raw' frequencies, you can customize the frequency by CAN ID
- Control signal: Specify when to start/stop logging based on specific CAN signal thresholds
If the SD is full, cyclic logging lets the CANedge CAN logger continue recording data by deleting the oldest log files first.
For an overall intro to CAN logging with the CANedge, see our 45 min webinar.
In the below, we outline the basics of how you can start logging raw CAN data:
- Connect the CAN logger to your CAN bus (optionally using our adapter cables)
- The device powers on, detects the bit rate and starts logging raw data to the SD card
- Disconnect the device, extract the SD and insert it into your PC
- Open the raw log files in e.g. the asammdf GUI/API for DBC decoding and visualization
Next, you can e.g. set up your own server and configure the CANedge2 to connect to your WiFi to auto-upload log files. When the device is connected, it'll automatically upload log files when they are available on the SD card. Once successfully uploaded, log files are deleted from the SD card.
For more details on getting started, see the CANedge Intro and Docs - or contact us if any questions.
The CANedge is designed to offer the best value/cost ratio in the 'pro specs' CAN/LIN logger market.
In particular, below factors differentiate it vs. similar devices:
- Pro specs: The CANedge offers specs on par with the best loggers available
- Compact: The CANedge is 50-80% smaller vs. similar devices
- Low cost: The CANedge is 50-80% lower cost vs. similar devices
- Easy-to-use: The device can be used out-the-box with no configuration
- FOSS: All software/API tools are 100% free and open source
- Interoperable: Open standards and tools enable integration into any system - with no lock-in
- Free support: We offer free best-in-class technical support
Don't take our word for it, though - check out our 50+ case studies from companies like VW, Siemens, Bosch, Cummins and more.
In addition to the above, the CANedge2 enables automatic upload of log files via WiFi to your own server:
- SD + WiFi: Auto-upload your data via WiFi - and buffer them on the SD when no WiFi is available
- Your server: Retain 100% ownership and control of your data by uploading data to your cloud/self-hosted server
- Security: The CANedge2 enables E2E enterprise grade security
Finally, the inclusion of internal GNSS/IMU solidifies the versatility of the device.
The above makes the device an excellent choice for e.g. automotive/industrial OEM engineers.
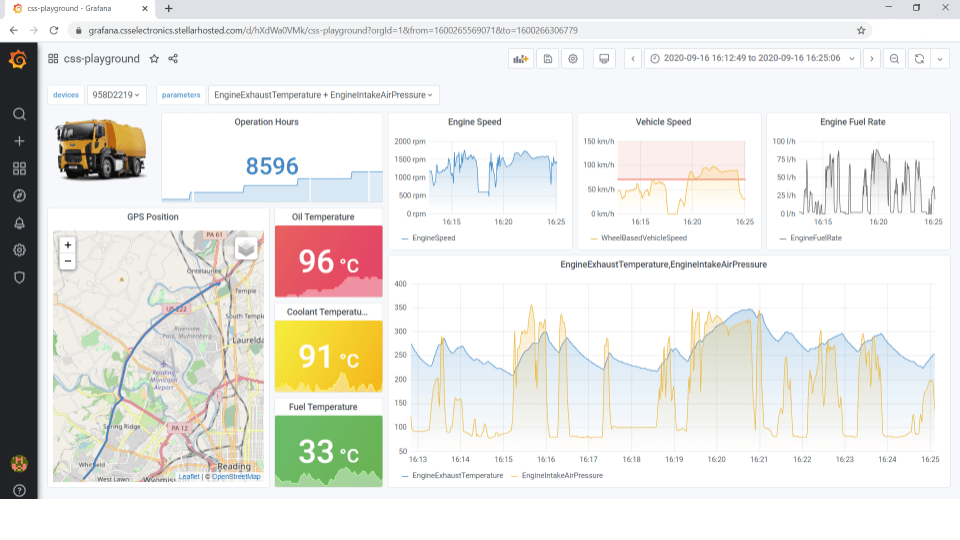
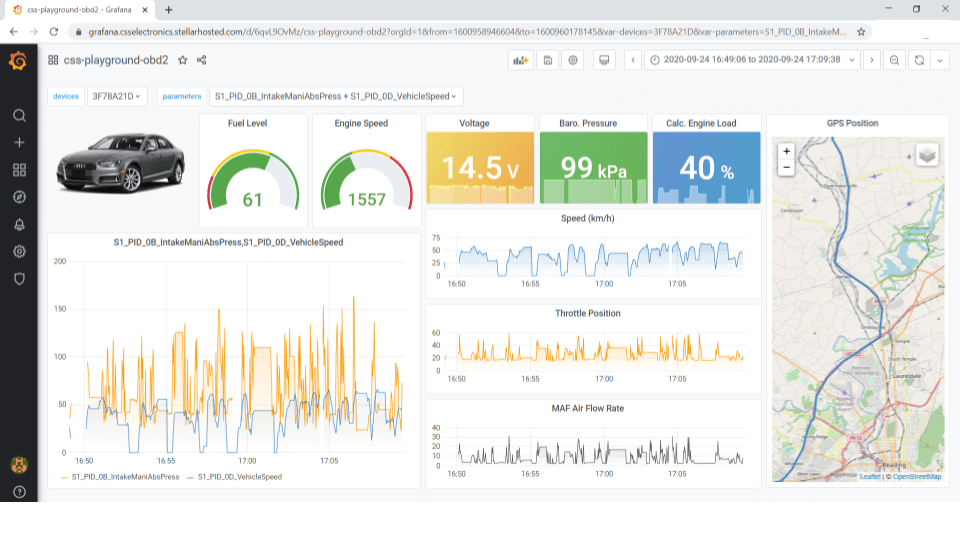
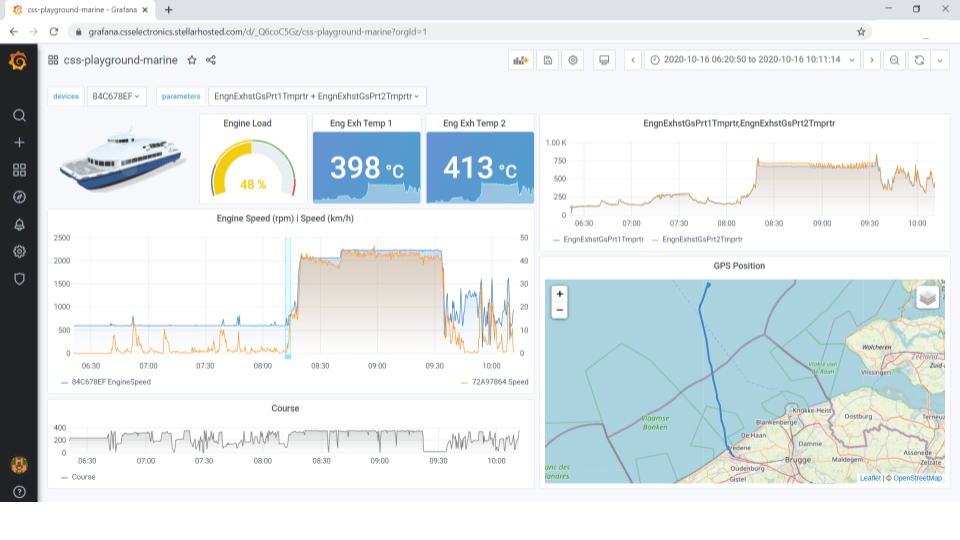
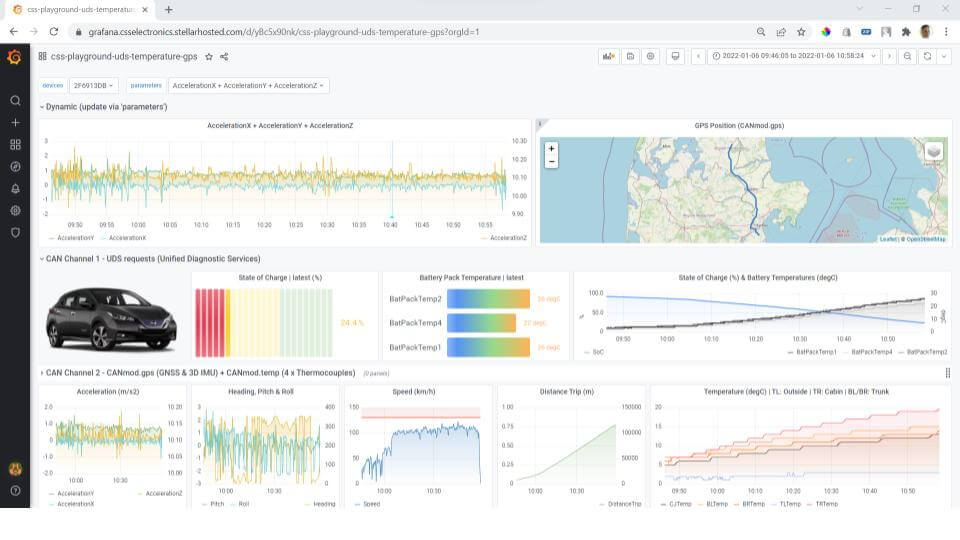
Yes, you can use our step-by-step guide to setting up 100% free, customizable telematics dashboards for visualizing your CAN bus data in your browser. The integration uses our free Python API to DBC decode raw CAN data (from local disk or your S3 server) and push it to a time series database. From here, the data can be visualized via the popular dashboard tool, Grafana, enabling fully custom dashboards - e.g. for J1939 telematics, OBD2 telematics, marine telematics, predictive maintenance and more.
For specific examples, see below playgrounds:
The CANedge2 can upload log files to any S3 server. This includes cloud servers like AWS, Google Cloud, Wasabi, Digital Ocean and more. It also includes self-hosted open source S3 servers like MinIO.
Self-hosting a MinIO S3 server on Windows/Linux (or a Pi) is simple - see our intro. MinIO is a 100% free, open source and lightweight solution. Simply download and start it up - and you're ready to setup your WiFi CAN bus data transfer.
Yes, the CANedge2 WiFi CAN logger is designed for easy CAN-to-cloud integration.
For AWS, Google Cloud, Wasabi S3 and DigitalOcean the setup can be done in < 5 min as they natively support the S3 interface - letting you quickly get started with your WiFi CAN bus data transfer.
For Azure (and other non-S3 cloud servers), you simply need to run an S3 gateway (e.g. Flexify.io) on the server. This is a bit more extensive vs. e.g. AWS/Google Cloud - but is still simple to set up.
For details, see our S3 cloud setup guide.
Generally, S3 cloud storage is low cost - and for this reason we recommend to use a cloud S3 server for most use cases as it simplifies deployment and scalability.
The cost of your cloud storage of course depends on how much data you upload - and how much you decide to retain. In most realistic scenarios where you've optimized your log file size via filters/prescalers/compression, a single CANedge would upload ~1 GB per month. Assuming you wish to retain the last year of data for each device, that means storing ~12 GB/device.
As an example, AWS S3 costs 0.023$ / GB / month - i.e. < 0.3$ / device / month for storing the latest 12 months of data.
Yes, you can easily automate your CANedge data processing through various tools:
- Python API: Our Python API lets you easily list, load and DBC decode your data (from local disk or your server). It is ideal for big data processing, database integration, predictive maintenance and more
- MATLAB: You can easily load your data in MATLAB's Vehicle Network Toolbox to leverage their data processing tools
- S3 API: You can use the S3 API to automate handling of files stored on your S3 server
To get started with automation, we recommend to check out our API examples on github.
The CANedge lets you fully customize which CAN IDs you record - and at what frequency. It also supports data compression and 'triggers' (to start/stop logging under certain conditions). Together, these features typically let you reduce your log file size by 90%+ - and it is highly recommended that you make use of them to minimize storage costs.
Due to the inclusion of internal GNSS/IMU in the CANedge, it already lets you record GNSS/IMU data.
For other sensor inputs (temperature, analog, digital, pulse, ...), you can connect external sensor-to-CAN modules to the device. In particular, our CANmod sensor-to-CAN modules can be easily combined with the CANedge.
Specifically, the CANedge 2nd port can supply 5V DC to external modules - enabling easy installation. Data from the connected sensor-to-CAN modules is recorded in the CANedge log files along with data from the other CAN/LIN channels.
Consider e.g. our CANmod.temp temperature-to-CAN module or CANmod.input analog/digital/pulse to CAN module.
The CANedge series is purpose-built for SD card logging/telematics and does not support real-time streaming via USB. For any real-time CAN streaming use case we recommend the CANsub, our pro specs CAN-USB/Ethernet streaming interface.
No, the CANedge2 has an 8-32 GB SD card and will simply operate as a standalone CAN logger if no WiFi is available. For most CAN bus applications, 8-32 GB will provide several months of data capacity. Further, if the SD card is full the device deletes the oldest log files to free up space via cyclic logging.
When the WiFi is available again, the CANedge2 automatically starts pushing the accumulated log files to your server. Once a log file is successfully uploaded, it is deleted from the SD card.
The CANedge2 can split files every 10 - 86400 seconds or every 1 - 512 MB. When a new log file is created, it is automatically transferred to your server if the CANedge2 is connected to a WiFi access point. As such, you can get a steady stream of incoming files - and by using e.g. AWS Lambda and our Python API, you can auto-process the incoming data in 'near real-time'.
We have various users that deploy the CANedge2 for near real-time upload, see e.g. this automotive predictive maintenance case study. However, setting this up for effective use requires a slightly more advanced use of the data processing tools available.
For most intents and purposes, however, we recommend to use medium/larger log file sizes (e.g. 5-20 MB) to avoid an excessive amount of log files in your server.
MQTT (Message Queuing Telemetry Transport) is a light weight messaging protocol, which is used by many IoT devices. As such, it is also supported by some cloud server IoT services for enabling e.g. statistics and analytics.
We originally considered the MQTT protocol as an option for uploading data via the CANedge2, but found that it is less suited for "big data" uploading. The protocol is ideal for very small packets at low resolution sent by e.g. streaming devices (with no local storage capability). However, for logging the full CAN bus load from e.g. a vehicle, the MQTT protocol would quickly get overloaded - resulting in very poor performance. For example, the protocol would make it practically impossible to "offload" all the data recorded on the CANedge2 SD card after e.g. a period with no coverage as new data would be recorded at a higher rate than it could be uploaded.
Instead, the CANedge2 utilizes the S3 REST interface with the HTTP(S) protocol. This combination is ideal for uploading large log file packets to either local/dedicated servers like MinIO or cloud servers like e.g. AWS, Google Cloud and Azure. In particular, it allows for uploading data from the CANedge2 much faster rate than new data is recorded - meaning that the device can stay offline for longer periods and still offload all log files when it regains coverage.
The CANedge2 currently supports 'Station Mode' with automatic upload of log files to your server via an S3 interface. As an alternative to the S3 interface, you can configure the device to use the web server interface. Here, you can pull data selectively by accessing the device SD card via your browser (like a web page) or via the REST API (e.g. via Python scripts). The CANedge2 can connect to an existing WiFi router - or you can use your laptop as the WiFi access point, thus practically enabling a form of 'Access Point' connectivity directly between your PC and the CANedge2.
The CANedge requires the use of a specific industrial SD card model in order to guarantee the performance and power safety. You can select an 8 or 32 GB SD card as an option during check-out (or as a separate purchase).
You should not use 3rd party SD cards as these may result in data corruption and other forms of non-functional behavior.
Yes, we actively seek to collaborate with partners - in particular 'system integrators'. The CANedge2 is designed to be easy to work with (plug & play cloud integration, open source file format, S3 interface, APIs, ...). The aim is that the device can serve as a plug & play hardware platform for companies focused on integrating the device in specific industries.
Please contact us to discuss further.
Still have questions?
Contact us